Jasper
Jasper is an End-to-End convolutional neural ASR system that uses a stack of 1D convolutions, batch normalization, ReLU, dropout, and residual connections trained with CTC loss to obtain state-of-the-art results on LibriSpeech dataset. Jasper was proposed by Nvidia in 2019 and published in this paper under the same name: “Jasper: An End-to-End Convolutional Neural Acoustic Model”. The official code can be found on Nvidia official GitHub Repository: Japser.
Jasper is a very deep convolutional model. The largest version of Jasper uses 54 convolutional layers (333M parameters), while smaller versions uses around 34 convolutional layers (201M parameters). To improve training on such large models, they proposed a new layer-wise optimizer called NovoGrad.
Next, we are going to talk about the two versions of Jasper that they proposed in the paper and they are: Jasper BxR and Jasper Dense Residual.
Jasper BxR
Jasper BxR model has B blocks, each with R sub-blocks. Each sub-block applies the following operations in order as shown in the following figure: a 1D-convolution, batch norm, ReLU, and dropout. All sub-blocks in a block have the same number of output channels.
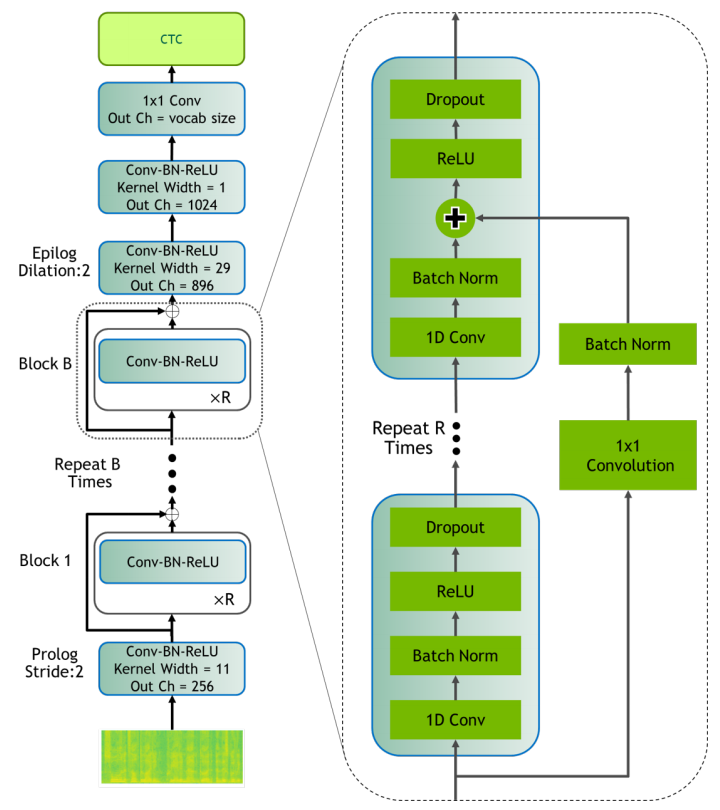
Each block input is connected directly into the last sub-block via a residual connection which is first projected through a $1 \times 1$ convolution to account for different numbers of input and output channels, then through a batch norm layer. The output of this batch norm layer is added to the output of the batch norm layer in the last sub-block. The result of this sum is passed through the activation function and dropout to produce the output of the current block.
Jasper Dense Residual
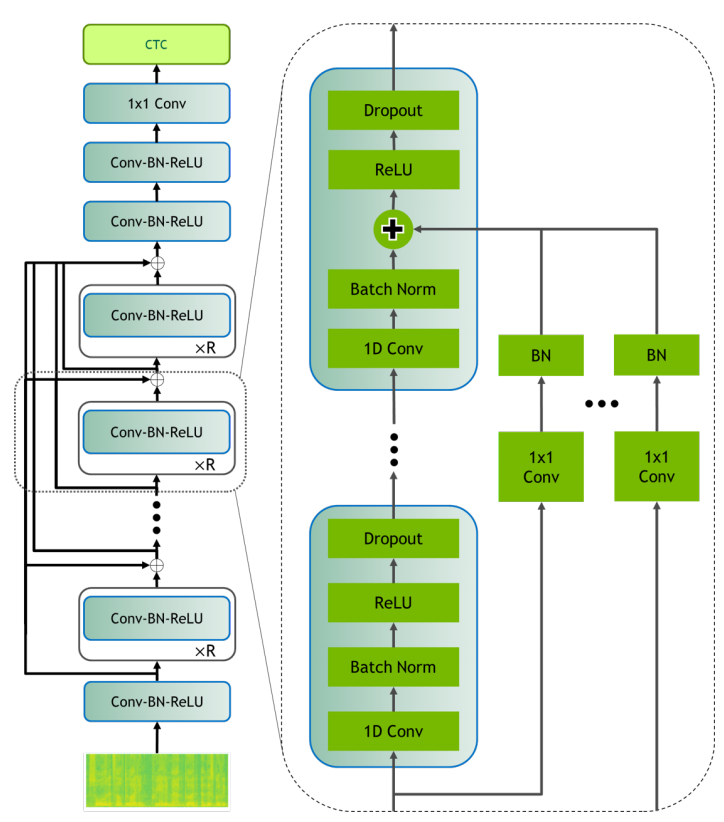
Jasper Dense Residual follows a residual connection topology called Dense Residual (DR) where the output of a convolution block is added to the inputs of all the following blocks.
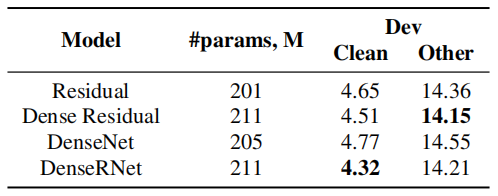
This is very similar to other architectures such as DenseNet and DenseRNet that concatenate the outputs of different layers. However, Jasper Dense Residual adds them together the same way that residuals are added in ResNet. According to the following table which measures the WER on LibriSpeech dataset, Desne Residual is as effective as earlier methods:
Note:
As you have probably guessed, the difference between Jasper BxR and Jasper DR is how the residual connection is formed.
NovoGrad
NovoGrad is an optimizer similar to Adam, except that its second moments are computed per layer instead of per weight. Compared to Adam, it reduces memory consumption and found to be more numerically stable.
At each step $t$, NovoGrad computes the stochastic gradient $g_{t}^{l}$ following the regular forward-backward pass. Then the second-order moment $v_{t}^{l}$ is computed for each layer $l$:
\[v_{t}^{l} = \beta_{2}.v_{t - 1}^{l} + \left( 1 - \beta_{2} \right).\left\| g_{t}^{l} \right\|^{2}\]The second-order moment $v_{t}^{l}$ is used to re-scale gradients $g_{t}^{l}$ before calculating the first-order moment $m_{t}^{l}$:
\[m_{t}^{l} = \beta_{1}.m_{t - 1}^{l} + \frac{g_{t}^{l}}{\sqrt{v_{t}^{l} + \epsilon}}\]If L2-regularization is used, a weight decay $\text{d.}w_{t}$ is added to the re-scaled gradient like so:
\[m_{t}^{l} = \beta_{1}.m_{t - 1}^{l} + \frac{g_{t}^{l}}{\sqrt{v_{t}^{l} + \epsilon}} + \text{d.}w_{t}\]Finally, new weights are computed using the learning rate $\alpha_{t}$:
\[w_{t + 1} = w_{t} - \alpha_{t}.m_{t}\]Experiments
Jasper uses mel-filter bank features calculated from $20ms$ windows with a $10ms$ overlap, and outputs a probability distribution over characters per frame. For decoding, they used two languages modeling options: statistical N-gram and neural Transformer-XL. They evaluated different sizes of Jasper across a number of datasets in various domains, like:
- LibriSpeech:
They trained Jasper DR 10x5 our NovoGrad optimizer for 400 epochs. As shown in the following table, Japser achieved SOTA performance on the test-clean subset and SOTA among end-to-end speech recognition models on test-other.

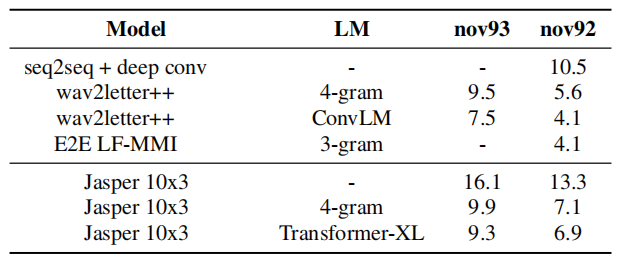
- Wall Street Journal (WSJ):
They trained a smaller Jasper 10x3 model using the SGD with momentum optimizer for 400 epochs on a combined WSJ dataset (80 hours). As shown in the following table, Jasper 10x3 with Transformer-XL achieves the competitive results:
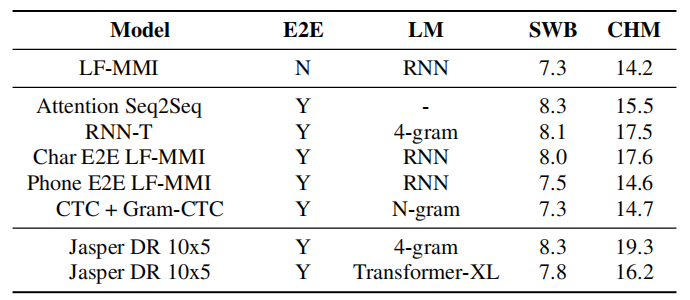
- Hub5 Year 2000 (Hub5'00):
They trained Jasper DR 10x5 using SGD optimizer with momentum for 50 epochs. As shown in the following table, Jasper obtained good results for SWB. However, there is work to be done to improve WER on harder tasks such as CHM: